je travaille dans la robotique. Robots industriels (6 axes). Je cherche depuis longtemps une manière de retrouver les nouvelles coordonnées d'un point dans un nouveau réferentiel tout en connaissant les anciennes coordonnées dans l'ancien référentiel.
Le robot travaille en quaternions.
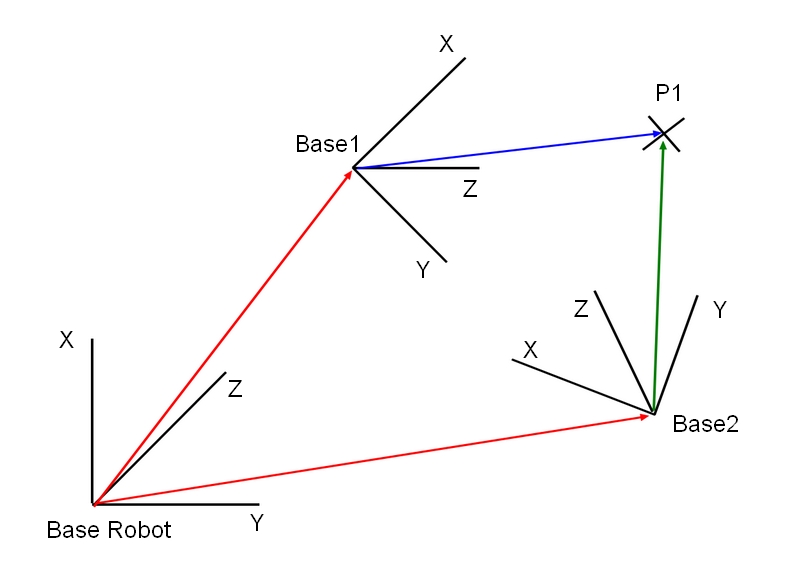
Données d'entrée connues :
- Base1 par rapport à la base Robot : Xb1, Yb1, Zb1, et ses quaternions Q1b1, Q2b1, Q3b1, Q4b1
- Base2 par rapport à la base Robot : Xb2, Yb2, Zb2, et ses quaternions Q1b2, Q2b2, Q3b2, Q4b2
- Les coordonnées du point P1 dans la Base1 : P1x, P1y, P1z et ses quaternions Q1p1, Q2p1, Q3p1, Q4p1
Données de sortie non connues et dont j'ai besoin :
- les nouvelles coordonnées du Point P1 dans la Base2 : nP1x, nP1y, nP1z et ses quaternions nQ1p1, nQ2p1, nQ3p1, nQ4p1.
On m'a parlé de matrice de passage mais je n'y connais rien en matrice.
Une âme charitable pour m'aider ??
